
Page 62 - วิศวกรรมสาร ปีที่ 78 ฉบับที่ 4 ตุลาคม - ธันวาคม 2568
P. 62
แนวทางการลดการแกว่งระหว่างการท�างานของปั้นจั่นโดยวิธีควบคุมแบบ Feedforward และ Feedback
ทั้งสองส่วนร่วมกันในลักษณะ PD-Controller จึงช่วยลดมุมแกว่ง 3.2 การควบคุมแบบ MPC
ได้อย่างมีประสิทธิภาพ อย่างไรก็ตาม การใช้งาน PD-Controller Model Predictive Control (MPC) เป็นวิธีควบคุม
จ�าเป็นต้องใช้เซนเซอร์ส�าหรับวัดทั้งมุมแกว่งและความเร็วเชิงมุม แบบป้อนกลับที่สร้างสัญญาณควบคุมโดยอาศัยการท�านาย
นอกจากนี้ ในหลายกรณี PD เพียงอย่างเดียวอาจยังไม่เพียงพอกับ พฤติกรรมของระบบล่วงหน้า และใช้หลักการของทฤษฎีการ
การที่จะควบคุมการสั่นของปั้นจั่น เช่นกรณีที่มีแรงลมซึ่งท�าให้เกิด ควบคุมเชิงเหมาะที่สุด (Optimal Control Theory) เพื่อเลือก
มุมแกว่งคงค้างอยู่ตลอดเวลา หรือปั้นจั่นก�าลังมีการเปลี่ยนแปลง สัญญาณควบคุมที่เหมาะสมที่สุดตามพฤติกรรมที่คาดการณ์ไว้ หลัก
ความเร่ง ในสถานการณ์เช่นนี้ I-Controller จะช่วยเสริมแรง การท�างานของ MPC สามารถอธิบายได้ตามตัวอย่างในรูปที่ 4
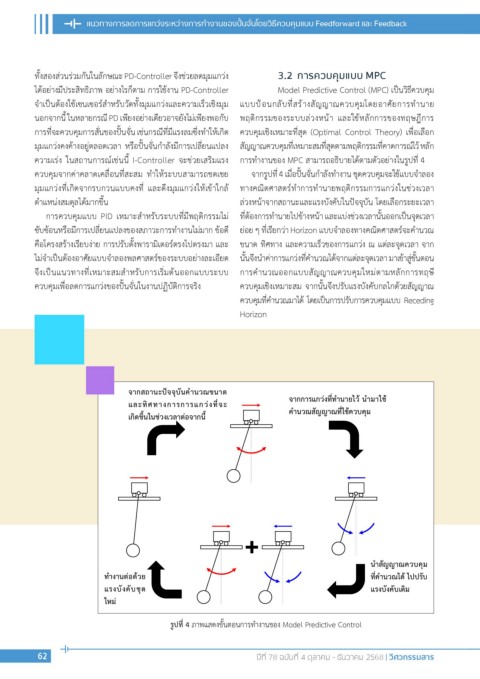
ควบคุมจากค่าคลาดเคลื่อนที่สะสม ท�าให้ระบบสามารถชดเชย จากรูปที่ 4 เมื่อปั้นจั่นก�าลังท�างาน ชุดควบคุมจะใช้แบบจ�าลอง
มุมแกว่งที่เกิดจากรบกวนแบบคงที่ และดึงมุมแกว่งให้เข้าใกล้ ทางคณิตศาสตร์ท�าการท�านายพฤติกรรมการแกว่งในช่วงเวลา
ต�าแหน่งสมดุลได้มากขึ้น ล่วงหน้าจากสถานะและแรงบังคับในปัจจุบัน โดยเลือกระยะเวลา
การควบคุมแบบ PID เหมาะส�าหรับระบบที่มีพฤติกรรมไม่ ที่ต้องการท�านายไปข้างหน้า และแบ่งช่วงเวลานั้นออกเป็นจุดเวลา
ซับซ้อนหรือมีการเปลี่ยนแปลงของสภาวะการท�างานไม่มาก ข้อดี ย่อย ๆ ที่เรียกว่า Horizon แบบจ�าลองทางคณิตศาสตร์จะค�านวณ
คือโครงสร้างเรียบง่าย การปรับตั้งพารามิเตอร์ตรงไปตรงมา และ ขนาด ทิศทาง และความเร็วของการแกว่ง ณ แต่ละจุดเวลา จาก
ไม่จ�าเป็นต้องอาศัยแบบจ�าลองพลศาสตร์ของระบบอย่างละเอียด นั้นจึงน�าค่าการแกว่งที่ค�านวณได้จากแต่ละจุดเวลา มาเข้าสู่ขั้นตอน
จึงเป็นแนวทางที่เหมาะสมส�าหรับการเริ่มต้นออกแบบระบบ การค�านวณออกแบบสัญญาณควบคุมใหม่ตามหลักการทฤษี
ควบคุมเพื่อลดการแกว่งของปั้นจั่นในงานปฏิบัติการจริง ควบคุมเชิงเหมาะสม จากนั้นจึงปรับแรงบังคับกลไกด้วยสัญญาณ
ควบคุมที่ค�านวณมาได้ โดยเป็นการปรับการควบคุมแบบ Receding
Horizon
รูปที่ 4 ภาพแสดงขั้นตอนการท�างานของ Model Predictive Control
62 ปีที่ 78 ฉบับที่ 4 ตุลาคม - ธันวาคม 2568 l วิศวกรรมสาร