
Page 64 - วิศวกรรมสาร ปีที่ 78 ฉบับที่ 4 ตุลาคม - ธันวาคม 2568
P. 64
แนวทางการลดการแกว่งระหว่างการท�างานของปั้นจั่นโดยวิธีควบคุมแบบ Feedforward และ Feedback
โดยไม่จ�าเป็นต้องรอให้เกิดความคลาดเคลื่อนหรือ
สัญญาณรบกวนก่อนจึงค่อยแก้ไข เนื่องจากสัญญาณ
ควบคุมถูกค�านวณขึ้นจากแบบจ�าลองคณิตศาสตร์
ของปั้นจั่น วิธีควบคุมแบบ Feedforward จึงไม่
จ�าเป็นต้องพึ่งพาการวัดสัญญาณจากเซนเซอร์ ท�าให้
ลดต้นทุนการติดตั้งอุปกรณ์วัดได้ อย่างไรก็ตาม
ประสิทธิภาพของวิธีนี้ขึ้นอยู่กับความแม่นย�าของแบบ
จ�าลองพลศาสตร์ ซึ่งในทางปฏิบัติมักมีข้อจ�ากัด
เนื่องจากหลายปัจจัยในระบบจริงไม่สามารถรวมอยู่
ในแบบจ�าลองได้ครบถ้วน ไม่ว่าจะเป็นแรงลม การ
เสียดทานที่เปลี่ยนแปลง หรือความไม่แน่นอนของน�้า
หนักและรูปทรงของวัตถุ
ด้วยเหตุนี้ การควบคุมแบบ Feedforward มักให้ประสิทธิภาพ
สูงสุดเมื่อใช้งานร่วมกับการควบคุมแบบ Feedback ซึ่งจะท�าหน้าที่
ช่วยชดเชยความคลาดเคลื่อนที่เกิดจากความไม่แน่นอนของแบบ
จ�าลอง ในขณะที่ การคบคุมแบบ Feedforward นั้นจะช่วยสร้าง
สัญญาณควบคุมเบื้องต้นที่ส่งผลให้การแกว่งเริ่มต้นมีขนาดน้อยลง
ท�าให้ภาระงานของชุดควบคุมแบบ Feedback ลดลงและระบบ
สามารถควบคุมการแกว่งได้อย่างมีประสิทธิภาพสูงขึ้น
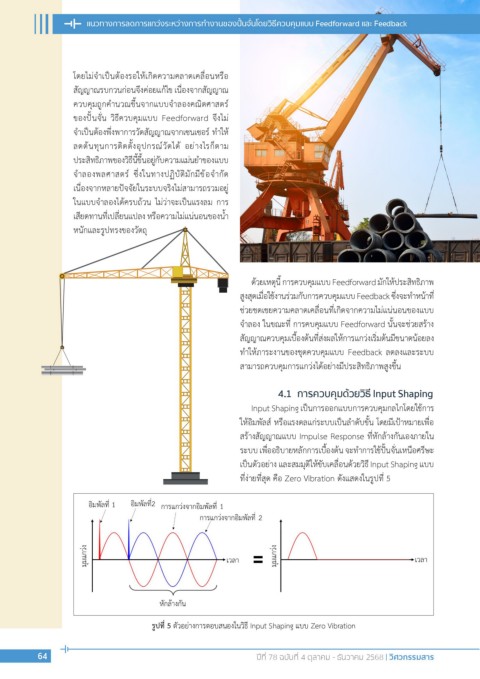
4.1 การควบคุมด้วยวิธี Input Shaping
Input Shaping เป็นการออกแบบการควบคุมกลไกโดยใช้การ
ให้อิมพัลส์ หรือแรงดลแก่ระบบเป็นล�าดับขั้น โดยมีเป้าหมายเพื่อ
สร้างสัญญาณแบบ Impulse Response ที่หักล้างกันเองภายใน
ระบบ เพื่ออธิบายหลักการเบื้องต้น จะท�าการใช้ปั้นจั่นเหนือศรีษะ
เป็นตัวอย่าง และสมมุติให้ขับเคลื่อนด้วยวิธี Input Shaping แบบ
ที่ง่ายที่สุด คือ Zero Vibration ดังแสดงในรูปที่ 5
รูปที่ 5 ตัวอย่างการตอบสนองในวิธี Input Shaping แบบ Zero Vibration
64 ปีที่ 78 ฉบับที่ 4 ตุลาคม - ธันวาคม 2568 l วิศวกรรมสาร