
Page 60 - วิศวกรรมสาร ปีที่ 78 ฉบับที่ 4 ตุลาคม - ธันวาคม 2568
P. 60
แนวทางการลดการแกว่งระหว่างการท�างานของปั้นจั่นโดยวิธีควบคุมแบบ Feedforward และ Feedback
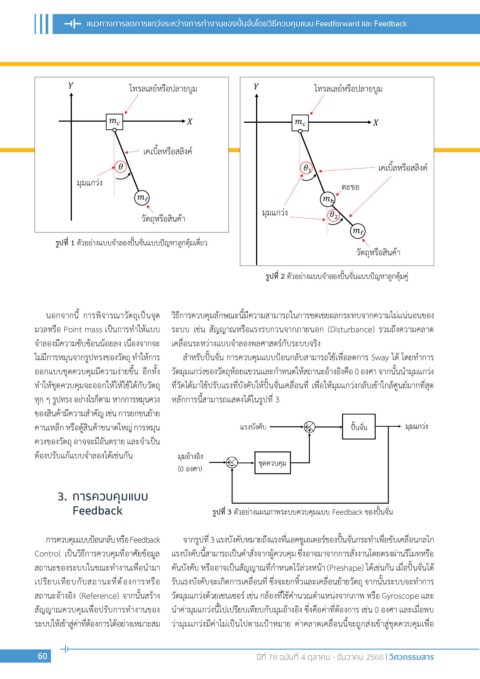
รูปที่ 1 ตัวอย่างแบบจ�าลองปั้นจั่นแบบปัญหาลูกตุ้มเดี่ยว
รูปที่ 2 ตัวอย่างแบบจ�าลองปั้นจั่นแบบปัญหาลูกตุ้มคู่
นอกจากนี้ การพิจารณาวัตถุเป็นจุด วิธีการควบคุมลักษณะนี้มีความสามารถในการชดเชยผลกระทบจากความไม่แน่นอนของ
มวลหรือ Point mass เป็นการท�าให้แบบ ระบบ เช่น สัญญาณหรือแรงรบกวนจากภายนอก (Disturbance) รวมถึงความคลาด
จ�าลองมีความซับซ้อนน้อยลง เนื่องจากจะ เคลื่อนระหว่างแบบจ�าลองพลศาสตร์กับระบบจริง
ไม่มีการหมุนจากรูปทรงของวัตถุ ท�าให้การ ส�าหรับปั้นจั่น การควบคุมแบบป้อนกลับสามารถใช้เพื่อลดการ Sway ได้ โดยท�าการ
ออกแบบชุดควบคุมมีความง่ายขึ้น อีกทั้ง วัดมุมแกว่งของวัตถุห้อยแขวนและก�าหนดให้สถานะอ้างอิงคือ 0 องศา จากนั้นน�ามุมแกว่ง
ท�าให้ชุดควบคุมจะออกให้ให้ใช้ได้กับวัตถุ ที่วัดได้มาใช้ปรับแรงที่บังคับให้ปั้นจั่นเคลื่อนที่ เพื่อให้มุมแกว่งกลับเข้าใกล้ศูนย์มากที่สุด
ทุก ๆ รูปทรง อย่างไรก็ตาม หากการหมุนควง หลักการนี้สามารถแสดงได้ในรูปที่ 3
ของสินค้ามีความส�าคัญ เช่น การยกขนย้าย
คานเหล็ก หรือตู้สินค้าขนาดใหญ่ การหมุน
ควงของวัตถุ อาจจะมีอันตราย และจ�าเป็น
ต้องปรับแก้แบบจ�าลองได้เช่นกัน
3. การควบคุมแบบ
Feedback รูปที่ 3 ตัวอย่างแผนภาพระบบควบคุมแบบ Feedback ของปั้นจั่น
การควบคุมแบบป้อนกลับ หรือ Feedback จากรูปที่ 3 แรงบังคับหมายถึงแรงที่แอคชูเอเตอร์ของปั้นจั่นกระท�าเพื่อขับเคลื่อนกลไก
Control เป็นวิธีการควบคุมที่อาศัยข้อมูล แรงบังคับนี้สามารถเป็นค�าสั่งจากผู้ควบคุม ซึ่งอาจมาจากการสั่งงานโดยตรงผ่านรีโมทหรือ
สถานะของระบบในขณะท�างานเพื่อน�ามา คันบังคับ หรืออาจเป็นสัญญาณที่ก�าหนดไว้ล่วงหน้า (Preshape) ได้เช่นกัน เมื่อปั้นจั่นได้
เปรียบเทียบกับสถานะที่ต้องการหรือ รับแรงบังคับจะเกิดการเคลื่อนที่ ซึ่งจะยกหิ้วและเคลื่อนย้ายวัตถุ จากนั้นระบบจะท�าการ
สถานะอ้างอิง (Reference) จากนั้นสร้าง วัดมุมแกว่งด้วยเซนเซอร์ เช่น กล้องที่ใช้ค�านวณต�าแหน่งจากภาพ หรือ Gyroscope และ
สัญญาณควบคุมเพื่อปรับการท�างานของ น�าค่ามุมแกว่งนี้ไปเปรียบเทียบกับมุมอ้างอิง ซึ่งคือค่าที่ต้องการ เช่น 0 องศา และเมื่อพบ
ระบบให้เข้าสู่ค่าที่ต้องการได้อย่างเหมาะสม ว่ามุมแกว่งมีค่าไม่เป็นไปตามเป้าหมาย ค่าคลาดเคลื่อนนี้จะถูกส่งเข้าสู่ชุดควบคุมเพื่อ
60 ปีที่ 78 ฉบับที่ 4 ตุลาคม - ธันวาคม 2568 l วิศวกรรมสาร