
Page 66 - วิศวกรรมสาร ปีที่ 78 ฉบับที่ 4 ตุลาคม - ธันวาคม 2568
P. 66
แนวทางการลดการแกว่งระหว่างการท�างานของปั้นจั่นโดยวิธีควบคุมแบบ Feedforward และ Feedback
ทั้งจากการละทิ้งพฤติกรรมบางอย่างเพื่อลดความซับซ้อนของ ควบคุมแบบ Feedforward ท�าออกแบบการควบคุมหลักที่ท�าให้
สมการ และจากความไม่แน่นอนที่ไม่สามารถประเมินหรือรวมไว้ การสั่นเกิดขึ้นน้อยที่สุดตั้งแต่แรก และใช้การควบคุมแบบ
ในสมการได้ การควบคุมแบบ Feedforward เพียงอย่างเดียวจึง Feedback ปรับสัญญาณการควบคุมเพื่อช่วยชดเชยผลกระทบจาก
ยังมีความเสี่ยงด้านสมรรถนะเมื่อใช้งานกับระบบจริง ความไม่แน่นอนและปัจจัยที่แบบจ�าลองไม่สามารถท�านายได้ ท�าให้
ดังนั้น เพื่อขจัดข้อจ�ากัดของแต่ละวิธี การใช้ทั้งสองแบบ ระบบสามารถควบคุมการแกว่งได้อย่างมีเสถียรภาพและเชื่อถือได้
ร่วมกันในลักษณะ Feedforward–Feedback จึงเป็นแนวทางที่ มากขึ้น
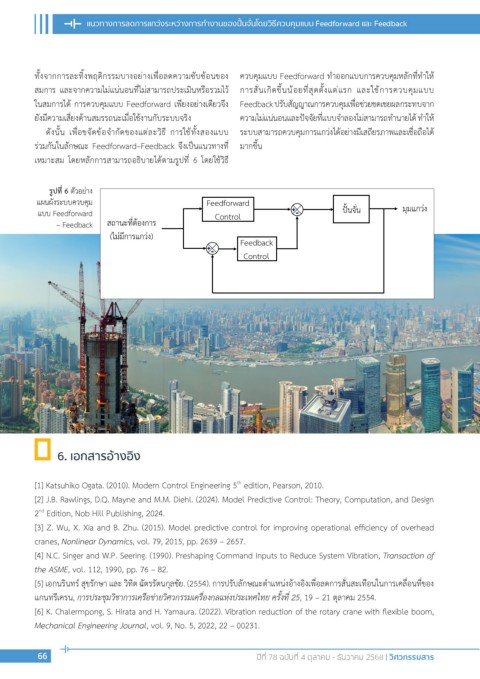
เหมาะสม โดยหลักการสามารถอธิบายได้ตามรูปที่ 6 โดยใช้วิธี
รูปที่ 6 ตัวอย่าง
แผนผังระบบควบคุม
แบบ Feedforward
– Feedback
6. เอกสารอ้างอิง
[1] Katsuhiko Ogata. (2010). Modern Control Engineering 5 edition, Pearson, 2010.
th
[2] J.B. Rawlings, D.Q. Mayne and M.M. Diehl. (2024). Model Predictive Control: Theory, Computation, and Design
2 Edition, Nob Hill Publishing, 2024.
nd
[3] Z. Wu, X. Xia and B. Zhu. (2015). Model predictive control for improving operational efficiency of overhead
cranes, Nonlinear Dynamics, vol. 79, 2015, pp. 2639 – 2657.
[4] N.C. Singer and W.P. Seering. (1990). Preshaping Command Inputs to Reduce System Vibration, Transaction of
the ASME, vol. 112, 1990, pp. 76 – 82.
[5] เอกนรินทร์ สุขรักษา และ วิทิต ฉัตรรัตนกุลชัย. (2554). การปรับลักษณะต�าแหน่งอ้างอิงเพื่อลดการสั่นสะเทือนในการเคลื่อนที่ของ
แกนทรีเครน, การประชุมวิชาการเครือข่ายวิศวกรรมเครื่องกลแห่งประเทศไทย ครั้งที่ 25, 19 – 21 ตุลาคม 2554.
[6] K. Chalermpong, S. Hirata and H. Yamaura. (2022). Vibration reduction of the rotary crane with flexible boom,
Mechanical Engineering Journal, vol. 9, No. 5, 2022, 22 – 00231.
66 ปีที่ 78 ฉบับที่ 4 ตุลาคม - ธันวาคม 2568 l วิศวกรรมสาร